
Olá a todos, segue mais um pequeno projeto arduíno, e hoje estarei mostrando como controlar um servo motor com Joystick, e a partir desse modelo você pode está controlando uma garra de um robô, carrinhos, entre outras criatividades, então vamos lá.
Materiais:
1 – Placa Arduíno UNO (pode usar qualquer modelo);
1- Uma Protoboard;
1 – Joystick;
1 – Servo Motor.
Modelo Esquemático
Segue modelo esquemático da prototipagem usando a IDE Fritzing. 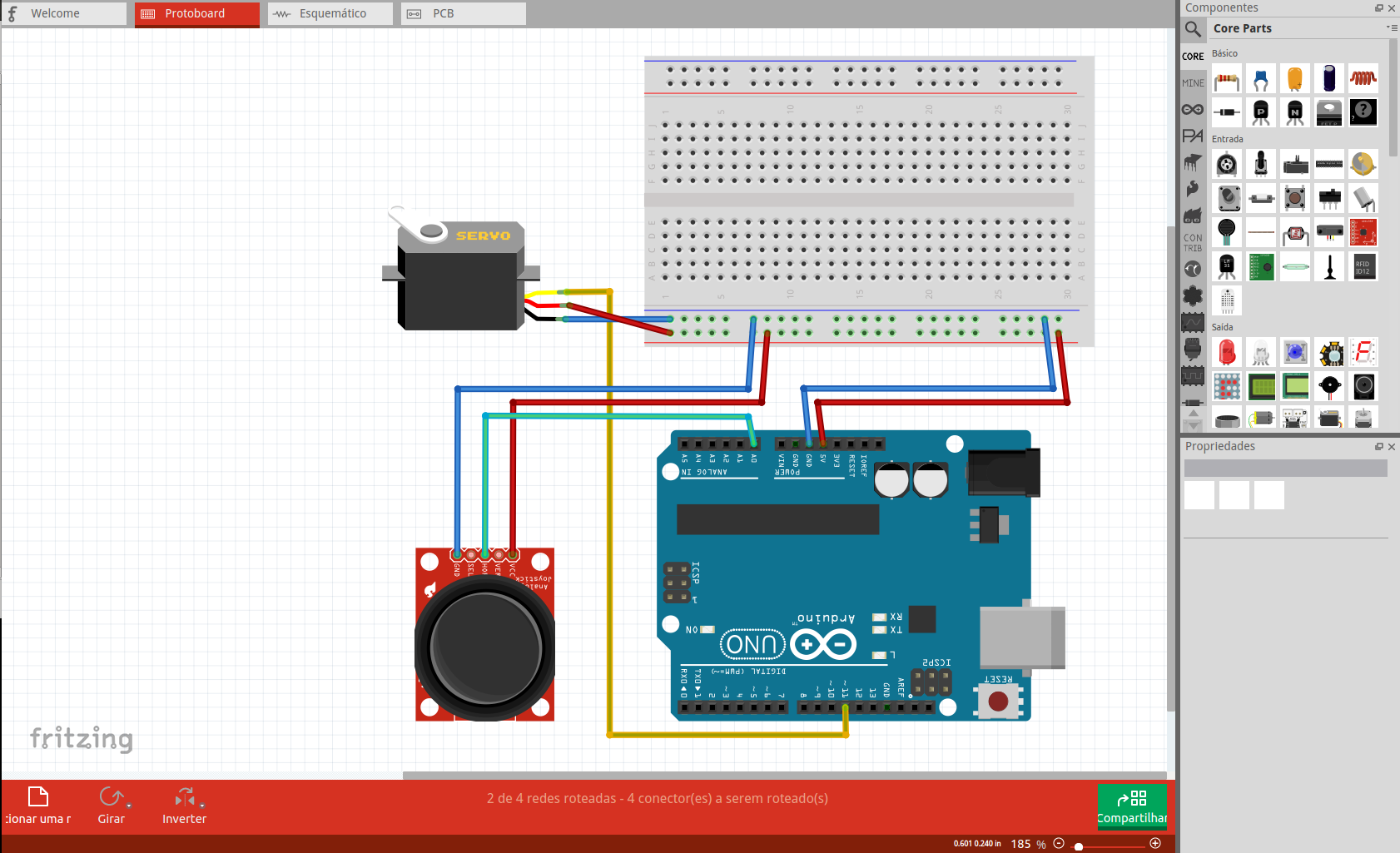
Código
Utilizando a IDE Arduíno escreva o seguinte código:
/*>>>| Controlando um servo motor com Joystick |<<<*/
/*>>>| site: http://www.clubedosgeeks.com.br |<<<*/
/*>>>| 30 de maio de 2014 |<<<*/
#include
Servo servo; /*Cria um objeto servo*/
int portCom; /*Cria uma variável para armazenar dados do Joystick*/
int servoPin = 11; /*Pino digital 11 conectado no servo*/
void setup(){
servo.attach(servoPin);
servo.write(90); /*Inicia o servo em 90 graus*/
}
void loop(){
portCom = analogRead(0); /*Pino X do Joystick para receber dados*/
portCom = map(portCom, 0, 1023, 0, 180); /*Faz um mapeamento dos dados recebidos*/
servo.write(portCom); /*O servo se movimenta de acordo com a posição do Joystick*/
delay(15); /*Tempo leitura do pino analogico A0*/
}
Vídeo
Espero que gostem, até a próxima.
[ads2]
Olá, estou fazendo um projeto para controlar dois servos motor MG995 e um motor DC mitsumi M28nN-1 R-14 7414,
onde os servos irão fazer um movimento independente, onde os dois servos iniciarão na posição 90 Graus, e depois o servo1 movimentara um braço de uma posição de 90 Graus a 140 Graus com movimento lento, e manter parado por 25 segundos e depois mudar para posição 80 Graus e manter parado por 25 segundos, e o servo2 quando o servo1 for para a posição 140 Graus o servo2 manterá na posição de 90 Graus aguardar 5 segundos e ir para o posição 80 Graus com movimento lento, e quando o servo1 for para a posição 80 Graus o servo2 manterá na posição 80 Graus aguardará 5 segundos e ir pra posição 110 Graus e depois fazer novamente os movimentos e parar e o motor DC movimentará uma base no sentido horário por 25 segundos movimento lento, e depois movimentar no sentido ant-horário por 25 segundos e depois parar, podes me ajudar com esse código, pois estou fazendo um braço robótico e queria fazer esses movimentos, se quiser ver a mecânica para entender melhor os movimentos posso enviar fotos por email ou whatsapp, se for possível fazer o circuito para o acionamento dos motores e quais componentes irei precisar para esse circuito, preciso muito urgente, desde já agradeço sua atenção, obrigado.
Amigo, por favor entre em contato por e-mail, preciso ver a mecânica.
Olá,
poderia ampliar este projeto, utilizando um transmissor/receptor para comandar o servo à distância?
Sim, poderei fazer, fique acompanhando logo postarei, outra coisa, se você tiver preferencias do tipo de comunicação, sinta-se a vontade para sugerir.
Bom dia eu estou montando um braço robótico com 4 servos é possível controlar os 4 servos com 1 Joystick através do Arduíno?Se poder me fornecer o código fonte eu agradeço obrigado…….
olá, estou vendo o seu projeto, mas não consigo ver o código. Teria como você me mandar por e-mail?